


Silver – autonomiczny robot klasy minisumo

Do jego...

Zespół konstruktorski: Dawid Kubiszewski, Daniel Jankowski, Michał Kosiński
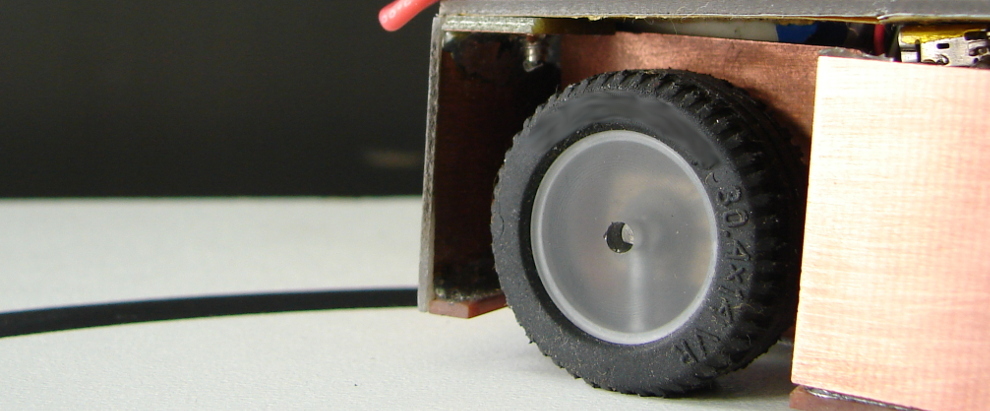
Nazwa robota: Lajt
Kategoria: minisumo
WięcejZdjęcia Fraglesa zrobione w trakcie prac nad nim oraz zdjęcia z zawodów we Krakowie, na których Fragles spisał się bardzo dobrze. Jeśli macie jakieś pytania do Wojtka i Daniela to zapraszamy na fanpage TKN-u na facebooku.
Więcej
Poniżej galeria zdjęć prezentująca robota stworzonego przez Alana. Zapraszamy także na naszą stronę
na facebooku’u gdzie możecie zapytać Alana o szczegóły jego konstrukcji.







Naj...
WięcejMontaż mechaniki (07.04.2011)
Po wielu tygodniach projektowania konstrukcji oraz zmaganiach z
czynnościami związanymi z pracami warsztatowymi, mamy przyjemność
poinformować o rozpoczęciu kolejnego etapu prac. Etapem tym jest końcowy
montaż mechaniki (konstrukcja ramy, zawieszenie oraz poszycie robota).
Pokonując trudy studenckiego dnia codziennego liczymy na szybkie odrobienie
zaległości aby godnie reprezentować nasz wydział na konkursie URC2011.
Jednocześnie pragniemy poinformować, że w zeszłym tygodniu trafiły do
Ministerstwa Nauki i Szkolnictwa Wyższego stosowne dokumenty, w których
zwracamy się z prośbą o sfinansowanie wyjazdu na interesujące nas zawody
łazików marsjańskich.
Drużyna
Sebastian Meszyński
Kierownik zespołu. Pracuje nad mechaniką, elektroniką, dokumentacją i autonomią robota.
Kamil Wyrąbkiewicz
Przewodniczący Technicznego Koła Naukowego. W projekcie zajmuje się elektroniką robota wraz z oprogramowaniem na procesorach sterujących w obrębie robota.
Rafał Zieliński
Projektuje rozproszone oprogramowanie sterujące robotem po stronie komputera PC.
Łukasz Borkowski
W projekcie jest osobą odpowiedzialną za zaprojektowanie i konfigurację sieci bezprzewodowej, która będzie używana do sterowania robotem.
Alan Morastiew
Dokumentacja techniczna robota.
Mateusz Józefowicz
Odpowiada za stronę organizacyjną projektu oraz wyjazdu na zawody ze strony stowarzyszenia Mars Society Polska.

Najnowsze komentarze