

Witam,
nareszcie mogę pochwalić się swoją konstrukcją, dzięki której uzyskałem tytuł inżyniera Automatyki i Robotyki ![]() Od obrony minęło nieco ponad pół roku, w związku z czym mogę już opublikować opis robota (niestety z pewnymi ograniczeniami).
Od obrony minęło nieco ponad pół roku, w związku z czym mogę już opublikować opis robota (niestety z pewnymi ograniczeniami).
Witam,
nareszcie mogę pochwalić się swoją konstrukcją, dzięki której uzyskałem tytuł inżyniera Automatyki i Robotyki ![]() Od obrony minęło nieco ponad pół roku, w związku z czym mogę już opublikować opis robota (niestety z pewnymi ograniczeniami).
Od obrony minęło nieco ponad pół roku, w związku z czym mogę już opublikować opis robota (niestety z pewnymi ograniczeniami).

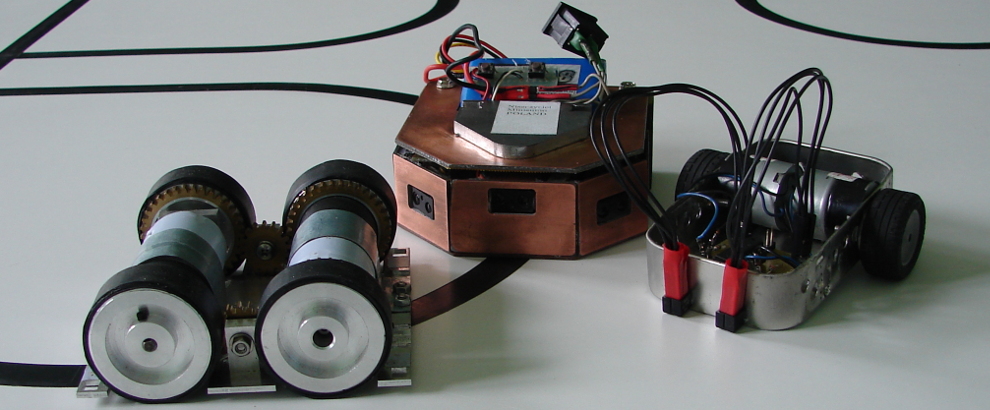
Poniżej galeria zdjęć prezentująca robota stworzonego przez Tusziego. Zapraszamy także na naszą stronę
na facebooku’u gdzie możecie zapytać Tusziego o szczegóły jego konstrukcji.



Konstruktor: Paweł Tuszyński

Nazwa robota: Porysowany
Kategoria: FTL
Źródło środków finansowych:
środki własne
silniki zostały sfinansowane przez Fundację AMICUS UMK
Założenia projektu:
robot analogowy;
wymiary max 9x8cm;
mała liczba elementów;
prosta konstrukcja;
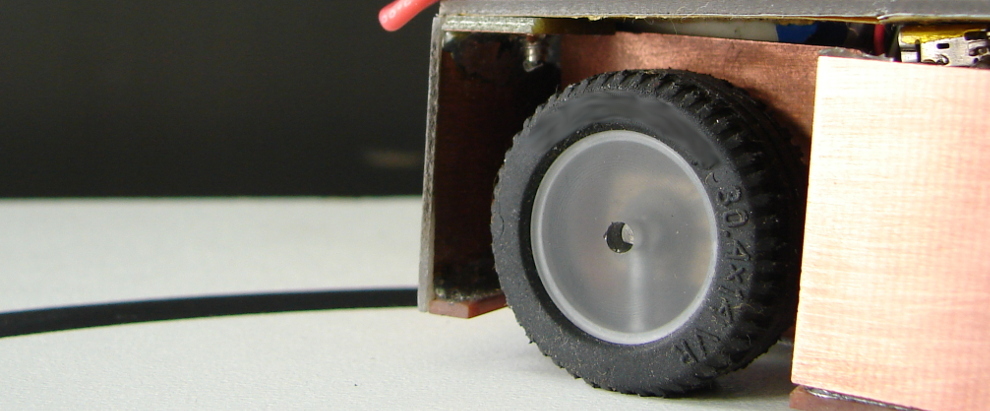
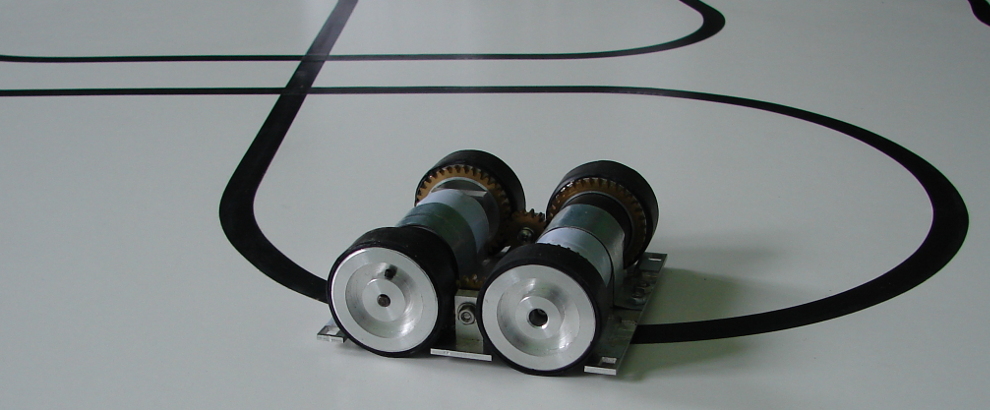
dwa niezależnie napędzane koła z gumowymi oponami;
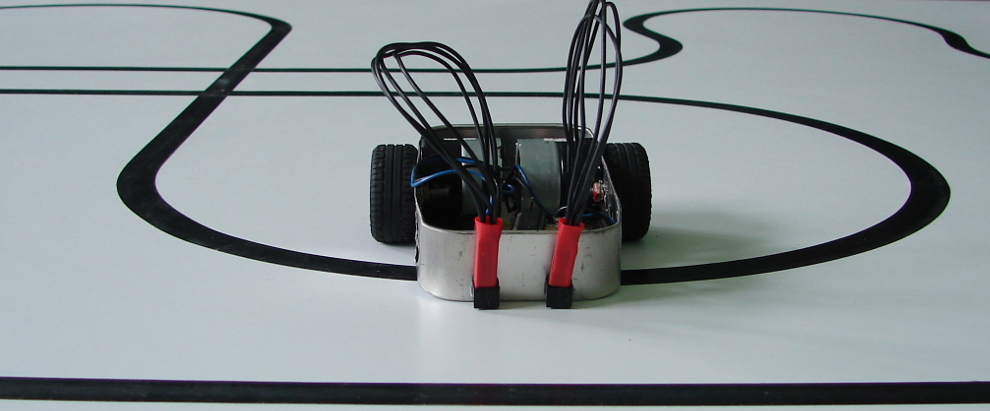
2 czujniki linii CNY70;
sterownie silników za pomocą układu scalonego L293D;
brak zastosowania mikrokontrolera.
Opis robota:
Do konstrukcji zastosowano napęd składający się z 2 silników 6 V DC 530 r.p.m. wraz z miękkimi gumowymi oponami. Zasilanie zapewnia pakiet NiMH 3,7 V o pojemności 120 mAh. Do wykrywania linii zastosowano 2 czujniki CNY70. Konstrukcje nośną stanowi metalowe pudełko po miętowych pastylkach do ssania...
Więcej
Najnowsze komentarze