


Zespół konstruktorski: Dawid Kubiszewski, Daniel Jankowski, Michał Kosiński
Nazwa robota: Lajt
Kategoria: minisumo
Źródło finansowania budowy robota:
Dofinansowanie środkami Fundacji AMICUS UMK oraz środki własne zespołu.
Założenia do projektu:
- maksymalna masa robota – 500 g;
- wymiary liniowe robota – 10×10 cm (szerokość x długość), wysokość nieograniczona;
- układ jezdny – dwa aluminiowe koła niezależnie napędzane;
- oprzyrządowanie pomiarowe – dwa czujniki odległości oraz dwa czujniki detekcji białej linii,
- układ sterowania oparty o mikrokontroler 8 bitowy;
- modułowa budowa robota umożliwiająca łatwy demontaż poszczególnych modułów;
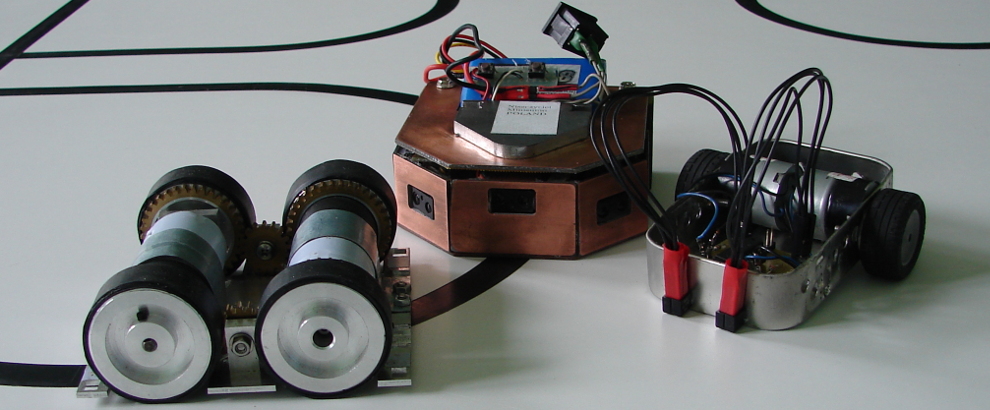
Opis robota:
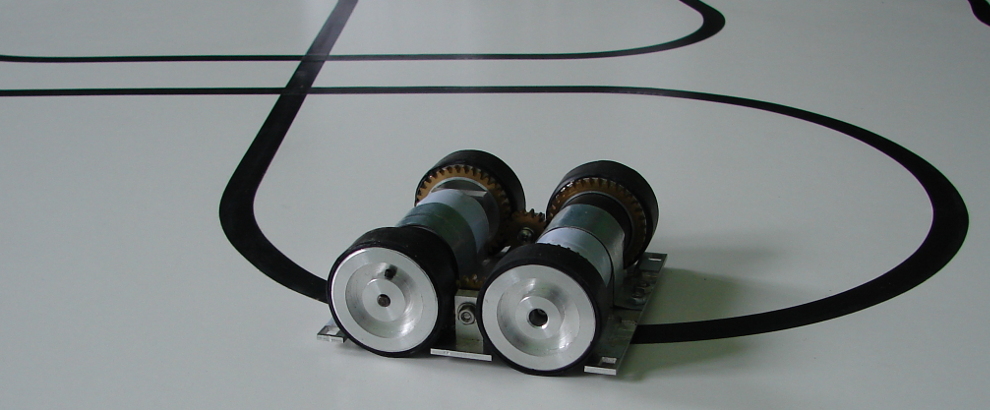
Układ napędowy robota oparto o dwa serwa modelarskie. Zdecydowano się na takie rozwiązanie ze względu
na dużą dostępność układów na polskim rynku, a także ze względu na niską masę i wbudowaną przekładnię
mechaniczną. Dzięki małym modyfikacjom serwa modelarskie zostały zaadaptowane do pracy jako napęd kół
robota. Serwa zasilane były poprzez dwa niezależne scalone mostki tranzystorowe L298 pozwalające
regulować prędkość obrotową a także kierunek wirowania silników, a tym samym kierunek poruszania robota.
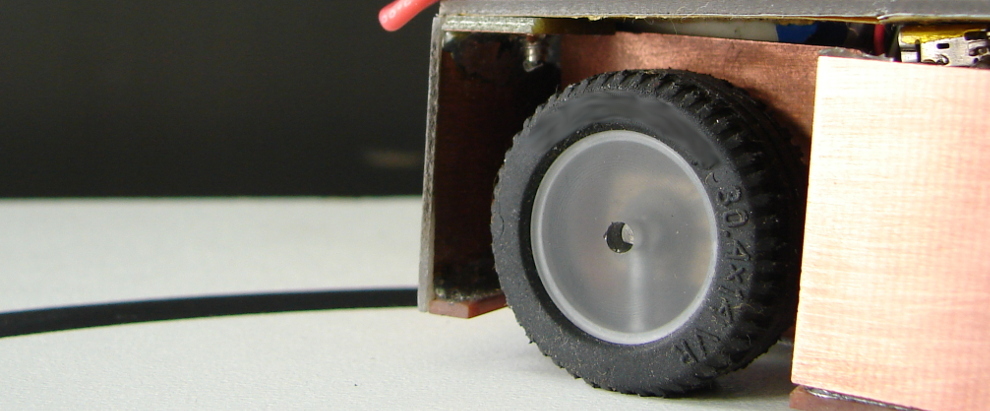
Układ jezdny robota oparto o dwa aluminiowe koła z dodatkowym ogumieniem. Koła zostały wykonane, przez
warsztat Wydziału Fizyki, Astronomii i Informatyki Stosowanej, na podstawie projektu sporządzonego przez
zespół. Materiał użyty do wykonania kół został wybrany ze względu na właściwości zapewniające niską masę
przy stosunkowo dużych wymiarach liniowych.
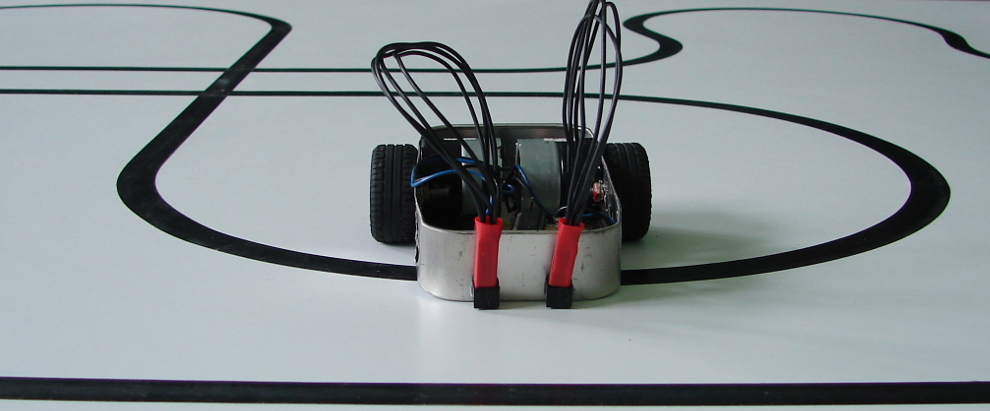
Do wykrywania przeciwnika zastosowano dwa czujniki optyczne GP2Y0D02YK firmy Sharp. Są to czujniki
pracujące w paśmie podczerwieni, które po wykryciu przeszkody podają na swoje wyjście stan wysoki (ok. 3,5 V).
Zasięg skuteczny działania czujników, otrzymany w trakcie testów, wynosi ok 70 cm. Czujniki te zamontowane
na czole robota. Jako czujniki wskazujący skrajne położenie robota na ringu zastosowano dwa czujniki koloru
QRD1114. Są to czujniki powszechnie stosowane przy tego typu projektach.
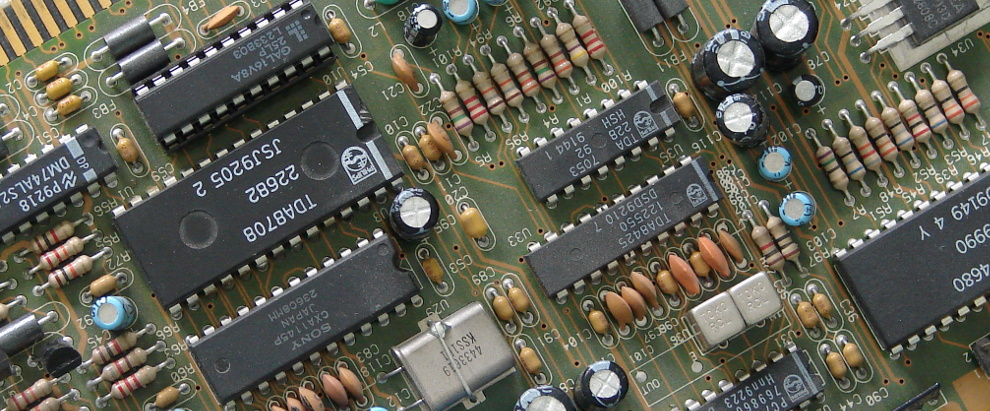
Układ sterujący robota zrealizowano na bazie mikrokontrolera Atmega 168. Zastosowano ten mikrokontroler
ze względu na dużą ilość wejść przerwań zewnętrznych i wysoką dostępność na rynku. Aby zminimalizować
ilość złącz wyprowadzonych na zewnątrz, a tym samym zminimalizować wymiary płytki sterującej, zastosowano
wbudowany bootloader umożliwiający wgrywanie oprogramowania. Oprogramowanie zostało napisane w
języku C z zastosowaniem zintegrowanego środowiska programistycznego AvrStudio firmy Atmel.
Aby umożliwić skuteczną konkurencję z innymi robotami konstrukcję wyposażono w pług służący do wypychania
robotów z ringu a także pełniący funkcję obudowy chroniącej układy wewnętrzne robota. Robot brał udział w
zawodach Robocomp, które odbyły się maju 2011r. w Krakowie. Niestety ze względu na, jak się okazało w trakcie
zawodów, nieco przestarzałą konstrukcję robot zajął trzecie miejsce w grupie i odpadł z dalszej rywalizacji.
Najnowsze komentarze