


Konstruktor: Alan Morastiew
Nazwa robota: Bronson
Kategoria: miniSUMO
Źródło środków finansowych:
Dofinansowanie z Fundacji AMICUS UMK – rudowa robotów miniSUMO.
Założenia projektu:
- waga max 500g,
- wymiary max 10x10cm,
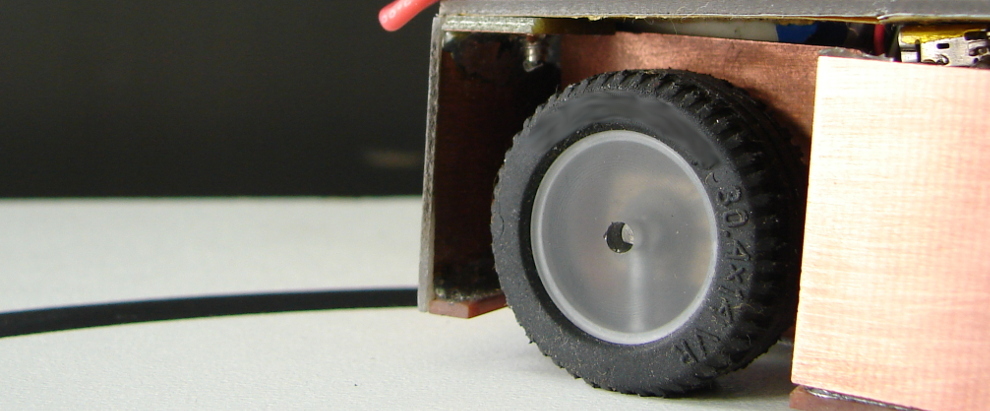
- sześć niezależnie napędzanych kół z gumowymi oponami,
- cztery krańcowe czujniki białej linii,
- elektronika wraz z czujnikami rozmieszczona na dwóch płytkach drukowanych, górnej oraz dolnej,
- dwa analogowe dalmierze optyczne,
- jednostka sterująca całego robota: mikrokontroler AVR Atmega32,
- pomiar napięcia zasilania,
- jeden wolny port do podłączania dodatkowych modułów lub czujników,
- wyświetlacz LCD alfanumeryczny podłączany dodatkowo do robota,
- duży aluminiowy pług zamontowany z przodu robota.
Opis robota:
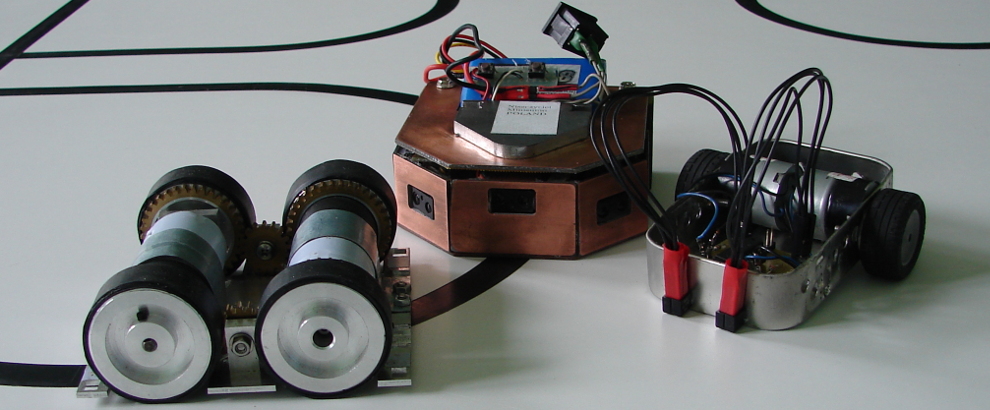
Zastosowano sześć kół z gumowymi oponami, które dają robotowi dużą przyczepność [1]. Każde koło ma
własny niezależny dzięki temu robot jest bardzo silny. Podczas testów bez trudu wypchnął z ringu
przeszkody w postaci garnka i czajnika wypełnionych wodą [2].
Do wykrywania białej linii zostały wybrane czujniki optyczne QRD1114 zamontowane w dolnej płytce.
Wybrano Atmege32 z uwagi dużą ilość portów wyjścia/wejścia.
Wykrywanie obecności przeciwnika wykonano przy pomocy dwóch dalmierzy optycznych SHARP GP2D12,
które zamontowano z przodu robota. Jeden wolny port w atmega32 został wyprowadzony w formie złącza
IDC. Dzięki temu w fazie testów do robota można było podłączać zewnętrzne moduły i czujniki, np. dodatkowe
dalmierze zamontowane z tyłu robota. Konstrukcja robota umożliwia podłączenie modułu wyświetlacza
alfanumerycznego LCD z dwoma przyciskami typu switch. Na wyświetlaczu można wyświetlać informacje takie
jak: poziom naładowania akumulatora oraz wskazania z czujników. Program sterujący do robota napisano
w języku BASCOM AVR.
Robot uczestniczył w zawodach Robocomp 14 maja 2011r. w Krakowie. Niestety podczas pierwszej
potyczki został fizycznie uszkodzony i nie mógł dalej walczyć w zawodach.
Aktualnie trwają prace nad drugą wersją robota, w której płytki z elektroniką będą specjalnie zabezpieczone
by podczas walki. Dodatkowe zabezpieczenie ochroni elementy tak, aby nie zostały uszkodzone podczas wali.
Druga wersja robota będzie posiadała sześć cyfrowych dalmierzy zamiast dwóch analogowych. Konfiguracja
taka umożliwi wykrywanie przeciwnika z każdej strony.
Poniżej znajduje sie galeria zdjęć z etapu konstrukcji robota miniSUMO.
Załączniki:
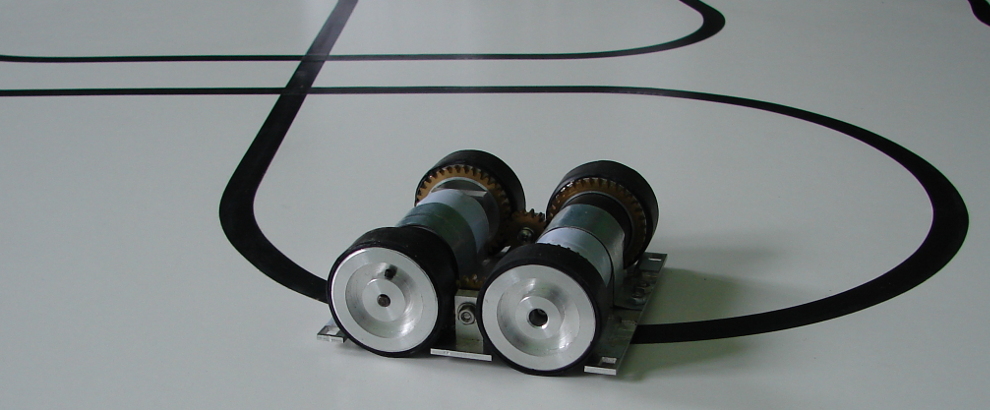
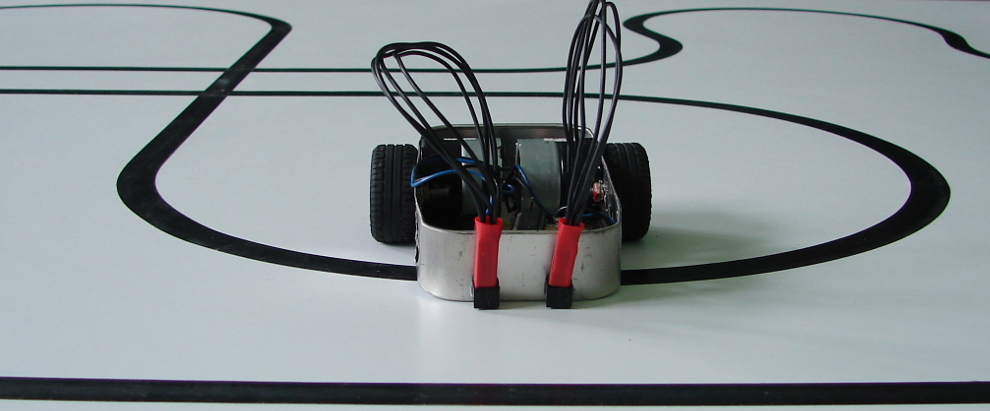
1. Robot w wersji linefolower:

2 . Testowanie siły robota:

Najnowsze komentarze