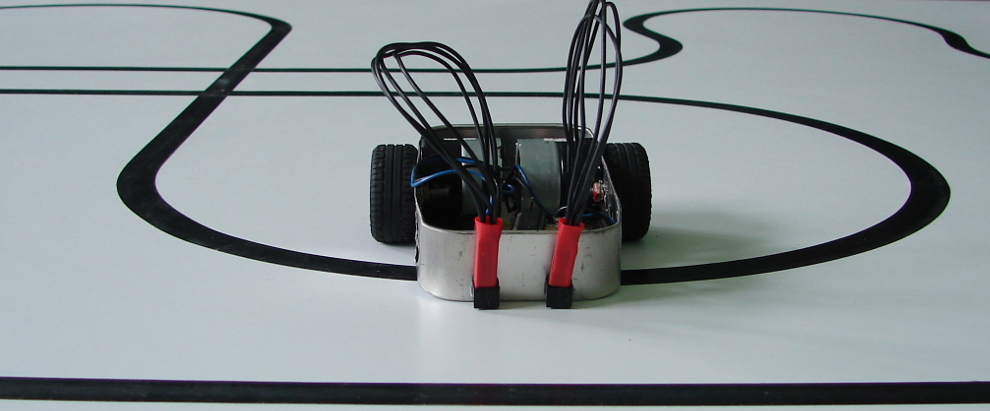
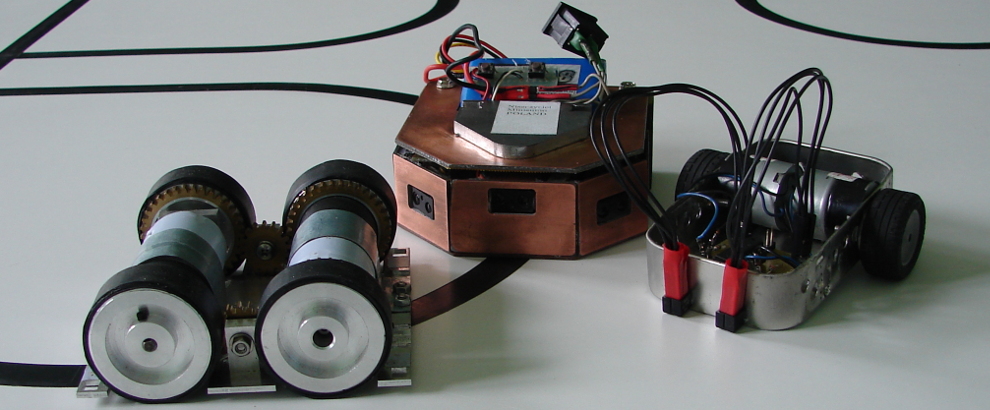


Robor Skipper skonstruowany przez Mateusza Kuzimskiego zajął 2 miejsce na zawodach w Łodzi.
Skipper:
- Robot klasy SUMO

- Zdalny start/stop
- Masa 2975g
- Rozmiar 190×200 mm
- Zasilanie elektroniki: Turnigy Nanotech 3S 1000 mAh
- Zasilanie napędu: Turnigy Nanotech 4S 3300 mAh
- 2 czujniki GP2Y0D02YK
- 2 czujniki GP2Y0A02YK
- 2 czujniki GP02Y0D340K
- 4 czujniki QRD 1114
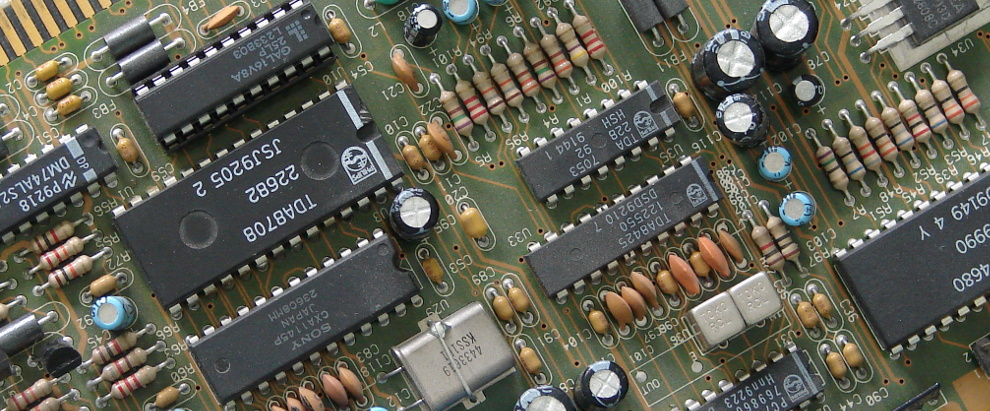
- Procesor: AtMega 90USB1287
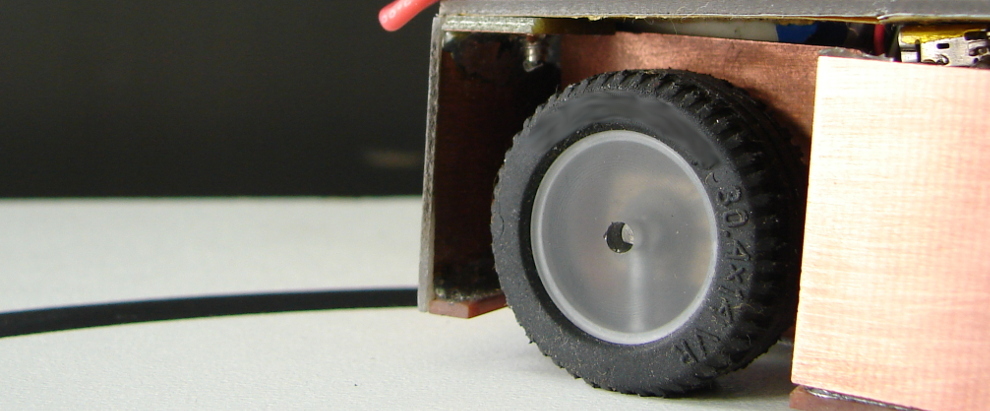
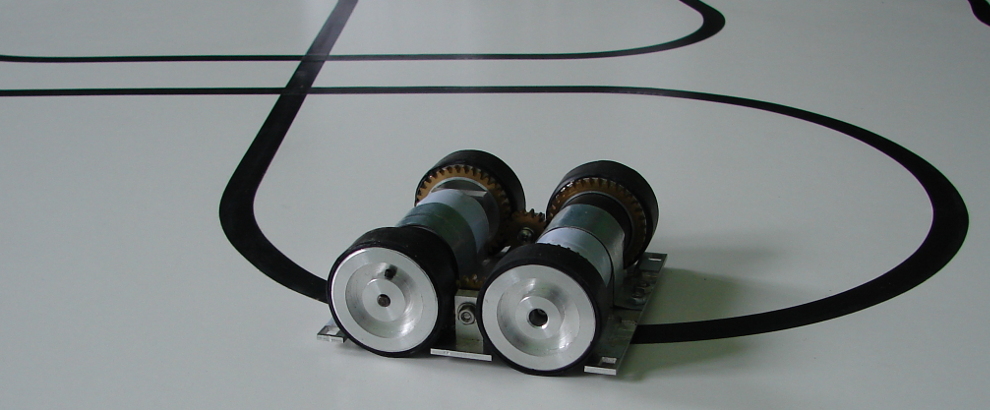
- 2 silniki z przekładniami wymontowane z wkrętarki BOSCH
- 2 mostki VNH3SP30
Pierwotna nazwa robota to Piernik robot ten powstał w 2008 roku i wielokrotnie zajmował miejsce na podium uczestnicząc w wielu zawodach o randze zawodów międzynarodowych. Ostatnie parę lat robot spędził jednak w wydziałowej gablocie jako efekt pracy studentów...
Więcej
Najnowsze komentarze