


Konstruktor: Paweł Tuszyński

Nazwa robota: Porysowany
Kategoria: FTL
Źródło środków finansowych:
-
środki własne
-
silniki zostały sfinansowane przez Fundację AMICUS UMK
Założenia projektu:
-
robot analogowy;
-
wymiary max 9x8cm;
-
mała liczba elementów;
-
prosta konstrukcja;
-
dwa niezależnie napędzane koła z gumowymi oponami;
-
2 czujniki linii CNY70;
-
sterownie silników za pomocą układu scalonego L293D;
-
brak zastosowania mikrokontrolera.
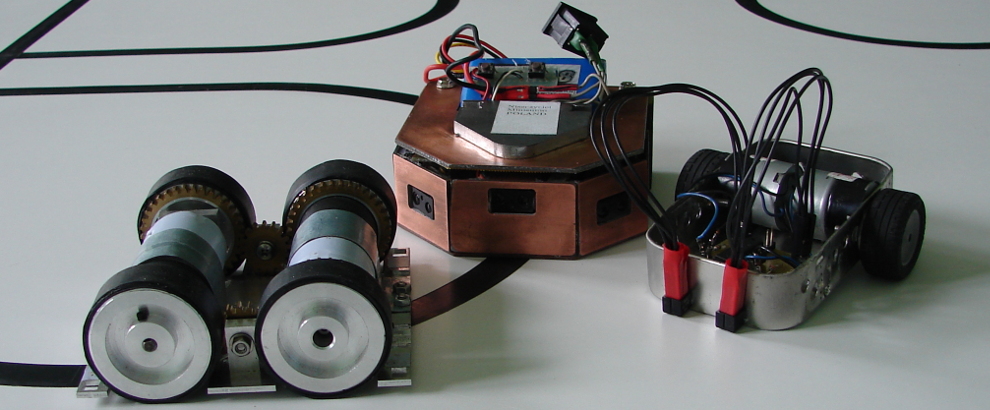
Opis robota:
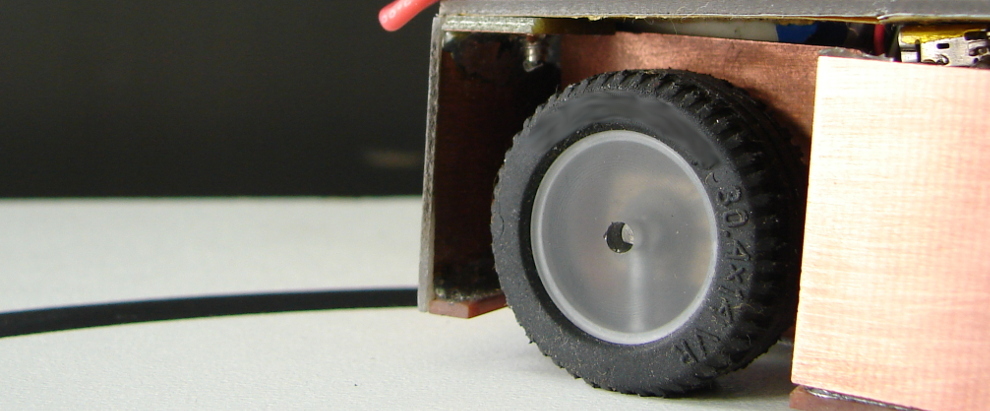
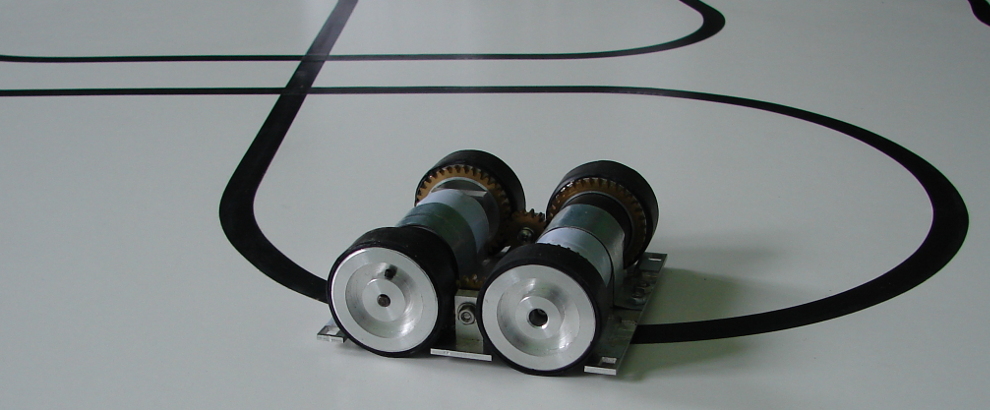
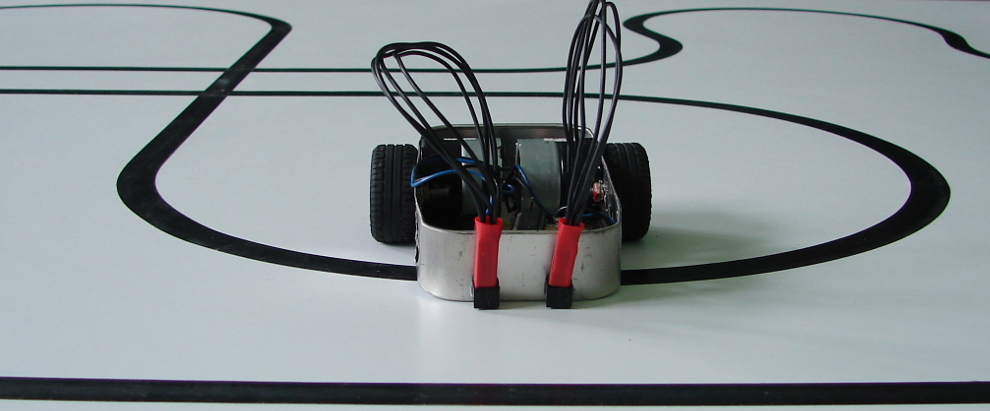
Do konstrukcji zastosowano napęd składający się z 2 silników 6 V DC 530 r.p.m. wraz z miękkimi gumowymi oponami. Zasilanie zapewnia pakiet NiMH 3,7 V o pojemności 120 mAh. Do wykrywania linii zastosowano 2 czujniki CNY70. Konstrukcje nośną stanowi metalowe pudełko po miętowych pastylkach do ssania. Wewnątrz niego znajduje się pakiet, elektronika oraz silniki. Za sterowanie robota odpowiada układ scalony L293D do którego doprowadzone zostały sygnały z czujników linii CNY70. Skręcanie robota odbywa się poprzez zatrzymanie jednego z silników, po uprzednim wykryciu czarnej linii na jednym z czujników CNY70. Czujniki linii są oddalone od siebie o 1cm, ze względu na szerokość linii na macie testowej. Płytka PCB wykonana została metodą termotransferu.
Robot został skonstruowany w przeciągu 3 dni. Porysowany nie uczestniczył w żadnych zawodach ponieważ został zmontowany w celach edukacyjno-rozwojowych. Pomimo, że przejazdy robota są wolne oraz niedokładne, to jest on wstanie pokonać całą trasę. W robocie dopracowania wymaga obudowa oraz ogólna estetyka. Sposobu jazdy nie można poprawić, ponieważ nie zastosowano mikrokontrolera umożliwiającego użycie złożonych algorytmów do przetwarzania wartości z czujników linii CNY70 w celu dokładniejszego sterowania silnikami.

Najnowsze komentarze