

Witam,
nareszcie mogę pochwalić się swoją konstrukcją, dzięki której uzyskałem tytuł inżyniera Automatyki i Robotyki ![]() Od obrony minęło nieco ponad pół roku, w związku z czym mogę już opublikować opis robota (niestety z pewnymi ograniczeniami).
Od obrony minęło nieco ponad pół roku, w związku z czym mogę już opublikować opis robota (niestety z pewnymi ograniczeniami).
Obudowa:
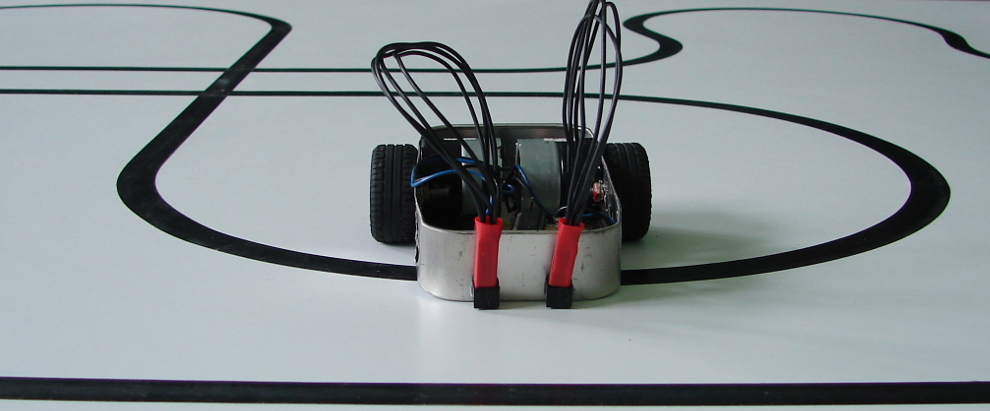
Obudowa została wykonana na ploterze CNC z płyty akrylowej o grubości 3mm. Składa się łącznie z sześciu elementów:
- dół o średnicy 12cm z otworami na czujniki
- mocowanie ślizgu
- 2 x mocowanie silnika
- mocowanie dalmierza Sharp GP2D12
- góra o średnicy 12cm z wycięciem na wyświetlacz oraz 4 klawisze
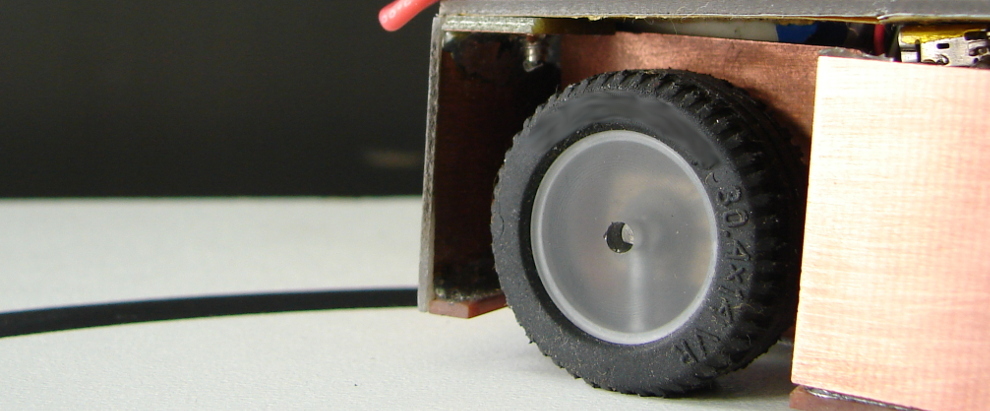
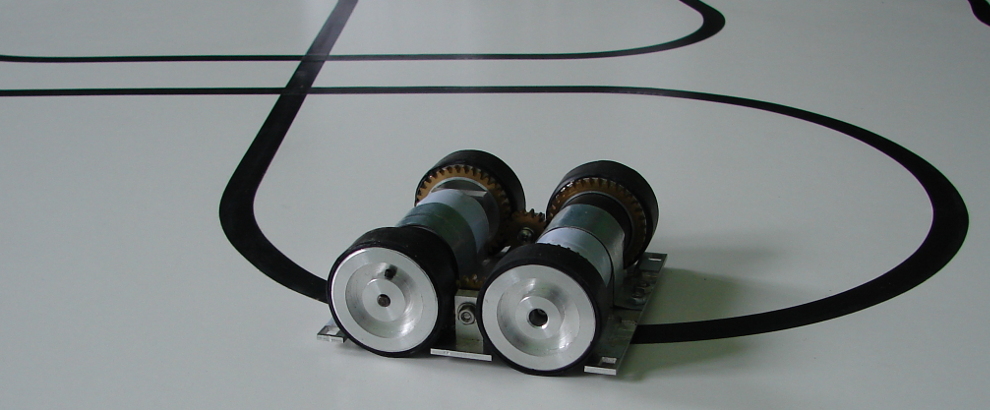
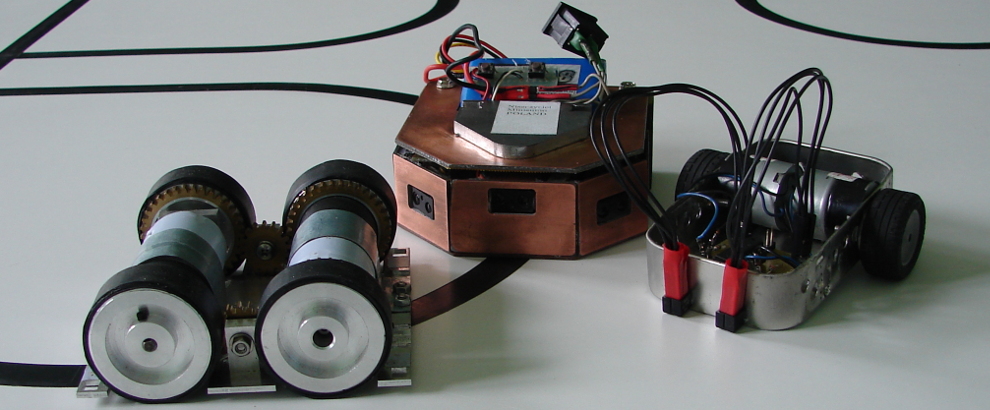
Źródłem zasilania jest modelarski akumulator li-pol 2s o napięciu znamionowym 7,4V i pojemności 500mAh. Ładowanie akumulatora odbywa się poza robotem za pomocą ładowarki z balanserem. Do poruszania się robot wykorzystuje silniki DG2425-025 oraz koła MBW-31 z firmy Wobit. Taki zestaw jest w stanie rozpędzić robota do prędkości ponad 0,6m/s.
Elektronika:
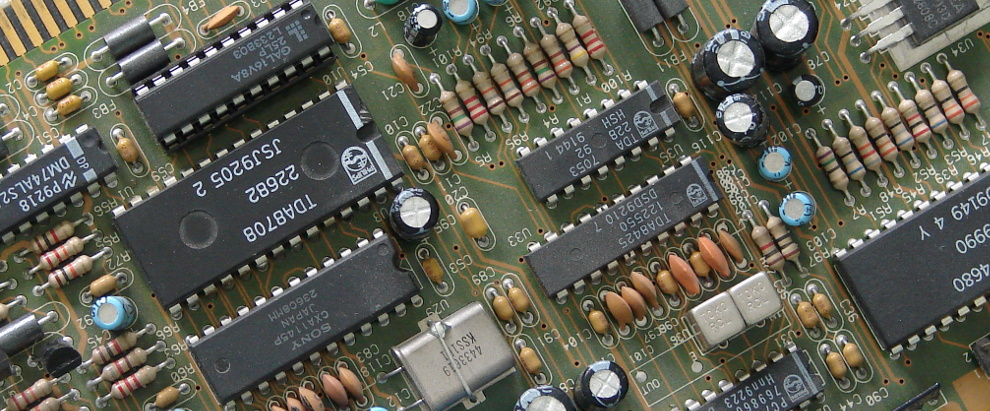
Robocik ma dwa mózgi w postaci mikrokontrolerów ATmega8L ![]() Jeden zajmuje się sterowaniem silnikami, odczytem czujników i obliczeniami a drugi odczytem klawiszy i obsługą wyświetlacza graficznego z Nokii 3310. Komunikacja pomiędzy nimi odbywa się za pomącą interfejsu UART. Dzięki takiemu rozdzieleniu obowiązków całość pracuje sprawniej a do połączenia obu obwodów drukowanych wystarczą 4 przewody.
Jeden zajmuje się sterowaniem silnikami, odczytem czujników i obliczeniami a drugi odczytem klawiszy i obsługą wyświetlacza graficznego z Nokii 3310. Komunikacja pomiędzy nimi odbywa się za pomącą interfejsu UART. Dzięki takiemu rozdzieleniu obowiązków całość pracuje sprawniej a do połączenia obu obwodów drukowanych wystarczą 4 przewody.
Stopień mocy w postaci mostka H skonstruowano w oparciu o tranzystory MOSFET oraz drivery IR4427. Dynamika pracy silników jest bardzo dobra a straty są na tyle małe, że niemożliwy jest ich pomiar przy pomocy multimetru!
Wykrywanie linii zapewnia 5 par dioda nadawcza + fototranzystor IR w obudowach o średnicy 3mm. Czujniki rozmieszczono po łuku, wzdłuż krawędzi obudowy. Wbrew obawom możliwe jest wykrywanie zakrętów pod kątem prostym.
Oprogramowanie:
W sofcie zawarto między innymi algorytm autokalibracji, obliczania pozycji robota nad linią, śledzenia linii, regulator PID oraz algorytm rozwiązywania labiryntów.




Najnowsze komentarze