

Konstruktor: Daniel Kruszyński
Nazwa robota: Złomek
Kategoria: miniSUMO
Źródło środków finansowych:
Dofinansowanie z Fundacji AMICUS UMK – budowa robotów miniSUMO.
Założenia projektu:
-
waga max 500g,
-
wymiary max 10x10x2.5cm,
-
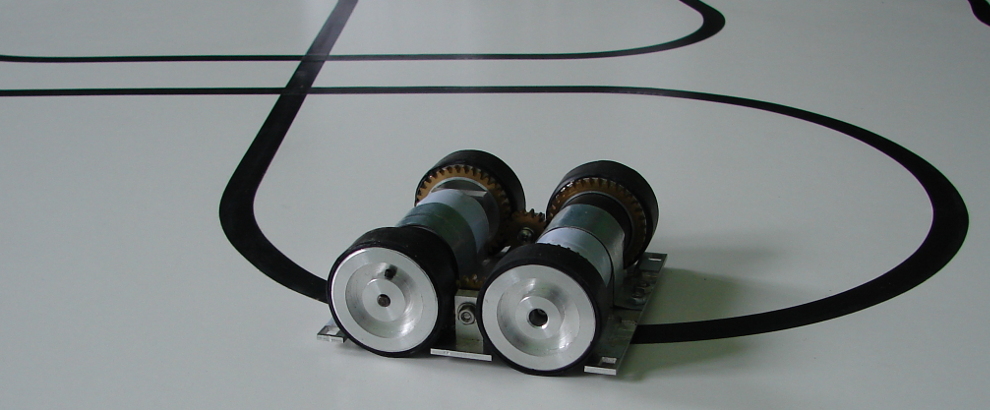
dwa niezależnie napędzane koła z gumowymi oponami,
-
dwa czujniki białej linii,
-
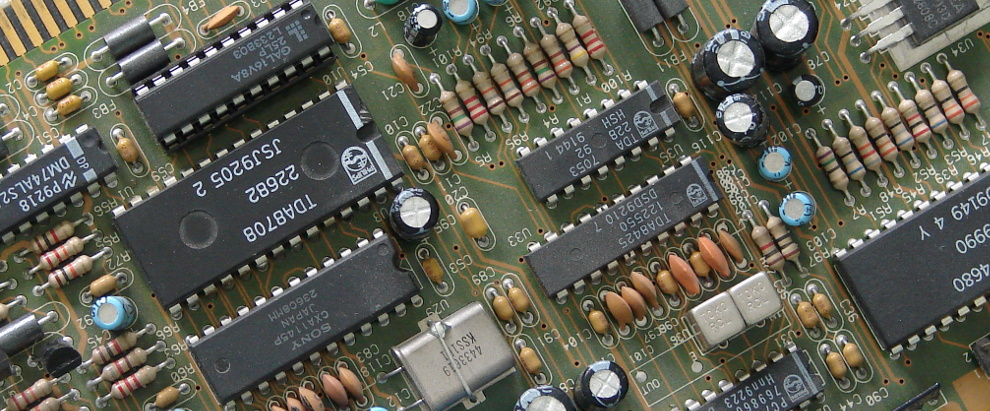
elektronika wraz z czujnikami rozmieszczona na płytce drukowanej,
-
dwa cyfrowe dalmierze optyczne,
-
jednostka sterująca całego robota: mikrokontroler AVR Atmega8
-
kształt: klin
Opis robota:
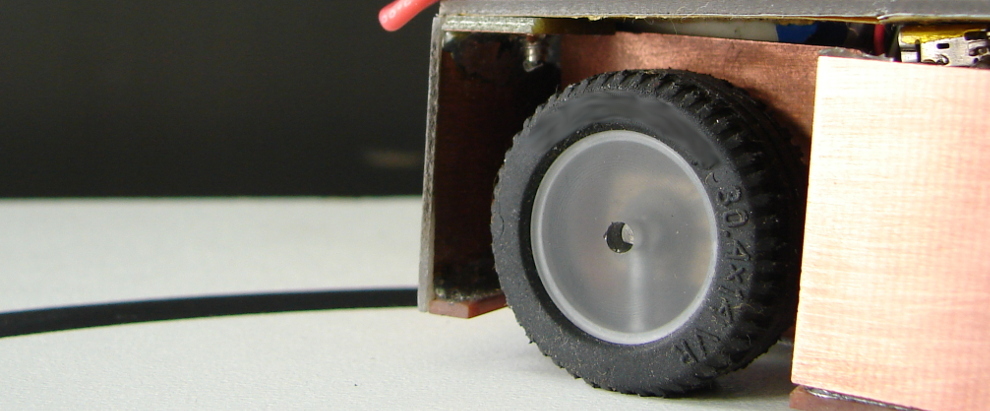
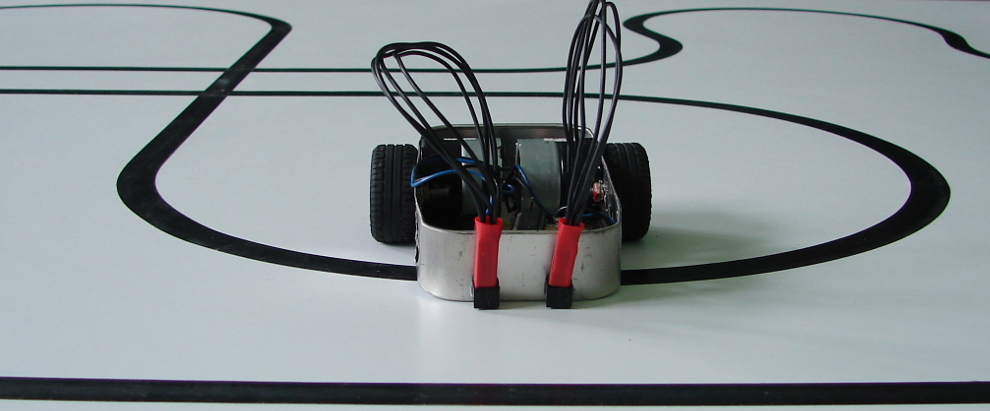
Głównym założeniem projektu było tworzenie jak najniższej konstrukcji z klinem o małym kącie nachylenia do powierzchni. Cała obudowa została wykonana ze stali wraz z mocowaniami silników i klinem połączonym z pokrywą elektroniki. Koła pokryto gumowymi oponami i dociążono stalowymi podkładkami. Starano użyć jak największych by zwiększyć przyczepność i prędkość robota.
Do wykrywania przeciwnika użyto dalmierzy Sharp GP2Y0D340K ze względu na ich wielkość i parametry zaś do wykrywania białej linii QRD1114.
Jako napęd wykorzystano dwa silniki DC 6V 340 r.p.m., usytuowane z tyłu konstrukcji, sterowane mostkiem L293D i zasilane bezpośrednio z akumulatora litowo – polimerowego 2S 7.4V.
Mózgiem robota była Atmega 8 ustawiona na taktowanie 8MHz. Złomek miał tylko włącznik zasilania dlatego program od razu rozpoczynał odliczanie 5 regulaminowych sekund. Istnieje możliwość wyboru kierunku obracania robota poprzez zasłonięcie jednego z czujników SHARP przy włączeniu.
Uczestniczył aktualnie w 3 zawodach:
-CybAiRBot 2012 Poznań
-Roboxy 2012 Gdańsk
-Leś-Tech 2012 Wronki
W Poznaniu wygrał konkurencje Deathmatch
Łącznie zaprojektowanie, zbudowanie i zaprogramowanie robota zajęło 2 miesiące.


Najnowsze komentarze