


Konstruktor: Wojtek Pawełek
Nazwa robota: Toudi
Kategoria: miniSUMO
Źródło środków finansowych:
Dofinansowanie z Fundacji AMICUS UMK – rudowa robotów miniSUMO
Założenia projektu:
- waga max 500g,
- wymiary max 10x10cm,
- obustronne zaostrzone pługi opuszczane za pomocą małego silniczka,
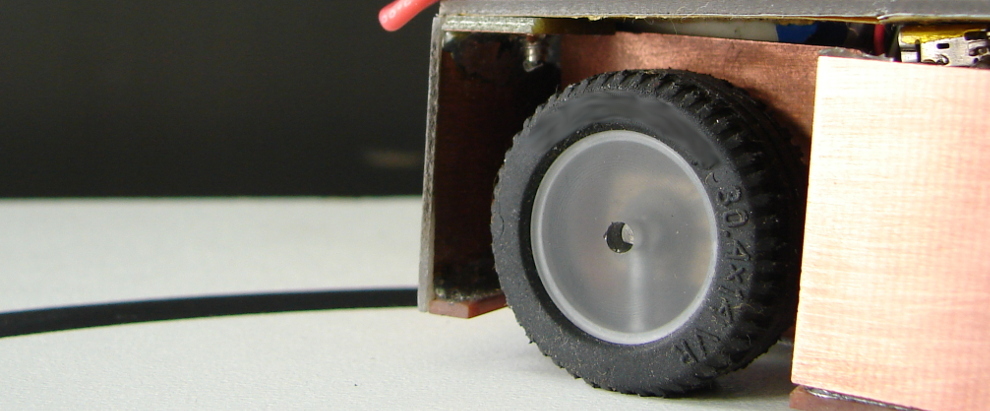
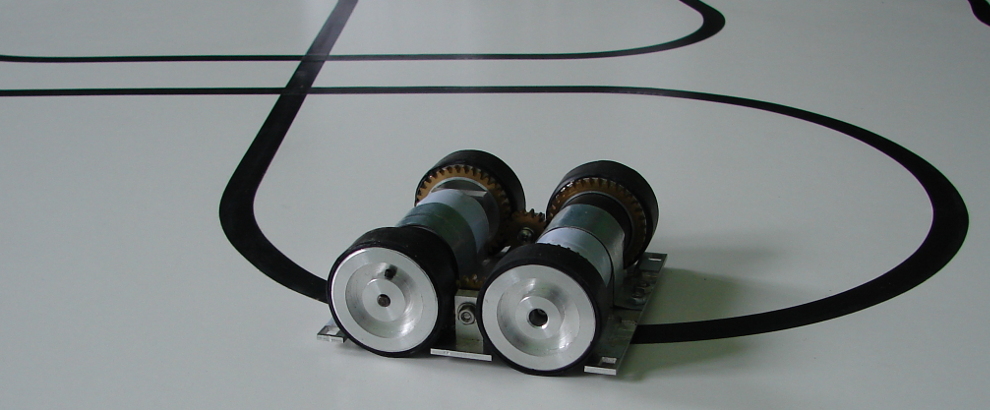
- cztery niezależnie napędzane koła z gumowymi oponami,
- 6 czujników odległości zamontowanych z każdej strony dla szybkiego wykrywania przeciwnika,
- czujniki linii w każdym rogu konieczne przy zastosowaniu obustronnych pługów,
- jednostka sterująca robota: mikrokontroler AVR Atmega8L,
- sterownie silników za pomocą układu scalonego L293D,
- przyspieszenie w trybie PWM,
- niska wysokość robota(<50 mm),
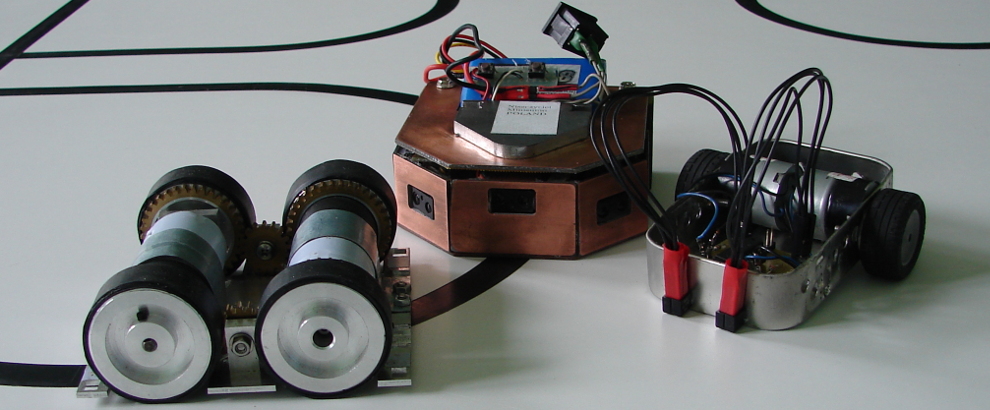
Opis robota:
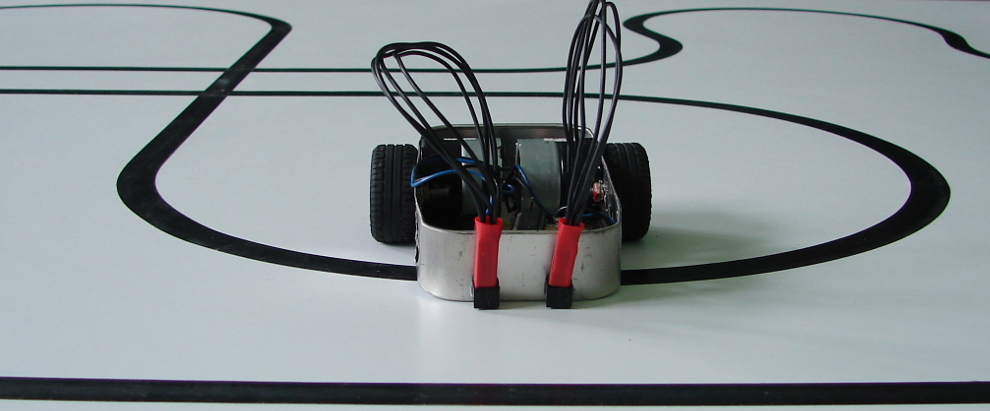
Do konstrukcji zastosowano napęd z 4 silników 6 V DC 530 r.p.m., koła z miękimi gumowymi oponami zapewniającymi dobrą przyczepność. Silniki zostały zamontowane na ramie wykonanej z aluminium. Zasilanie zapewnia pakiet litowo polimerowy 7,4 V 500 mAh. Sterowanie całego robota kontroluje mikroprocesor AVR Atmega8L. Sterowanie silników odbywa się poprzez układ scalony L293D. Wykrywanie przeciwnika jest możliwe poprzez zastosowanie 6 dalmierzy optycznych z wyjściem cyfrowym SHARP, które są zamontowane z każdej strony robota. Do wykrywania linii zastosowano 4 x QRD1114, zamontowano je w każdym rogu. Płytka z elektroniką zamontowana jest na górze robota, służy ona dodatkowo jako zamknięcie górnej części obudowy. Płytka PCB wykonana została metodą termotransferu. Program sterujący robotem został napisany w języku C.
Okres budowy robota wyniósł 1 miesiąc. Do tej pory uczestniczył w zawodach CYBER AIR BOT organizowanych w Poznaniu. Toudi po zakwalifikowaniu się do turnieju trafił do grupy z 7 innymi robotami przegrywając tylko jedną walke. W grupie zajął drugie miejsce, w cwiercfinale uległ finaliscie turnieju. Dopracowania w robocie wymaga program, a dokładniej taktyka początkowa.
Załączniki:
Najnowsze komentarze