

Jest to robot wykonany przez jednego ze studentów w ramach pracy inżynierskiej. W trakcie użytkowania uległ uszkodzeniu. Jego naprawy dokonał Alan Morastiew. Autorem robota jest Dariusz Hinz
Jest to robot sześcionożny, autonomiczny, wykorzystujący czujnik podczerwieni do pomiaru odległości do przeszkód znajdujących się przed nim. Interfejs został zrealizowany na wyświetlaczu LCD 2×16, którego obsługa odbywa się poprzez czteroprzyciskową klawiaturę. Robot posiada regulację wysokości oraz rozstawienia nóg. Po uruchomieniu jednego z programów wykonuje polecenia na zadanych parametrach.

są serwomechanizmy stosowane w modelarstwie RC.
Szkielet robota zaprojektowany został z myślą o łatwym serwisowaniu. Wszystkie
elementy połączone zostały bez użycia kleju w taki sposób, aby możliwa była łatwa wymiana każdego uszkodzonego elementu.


-sterownik serwomechanizmów
-jednostka centralna CPU
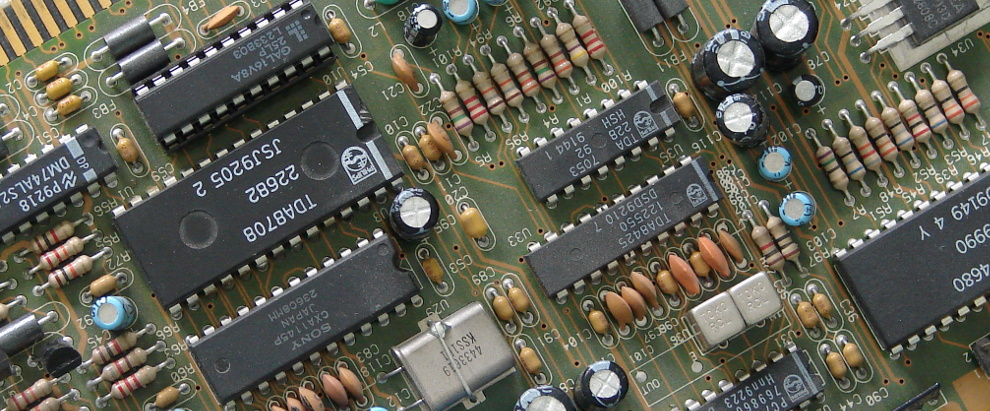
Głównym elementem sterownika jest procesor Atmega16 firmy Atmel.
Oprogramowanie zostało napisane w języku C przy użyciu programu AVR Studio.
odwrotnej dla wszystkich kończyn robota.
wydajności prądowej 3,8 Ah
na bazie układu MC34063A, a następnie moduł stabilizujący napięcie do wartości 5V
na bazie stabilizatora LM7805.



Najnowsze komentarze