

Robor Skipper skonstruowany przez Mateusza Kuzimskiego zajął 2 miejsce na zawodach w Łodzi.
Skipper:
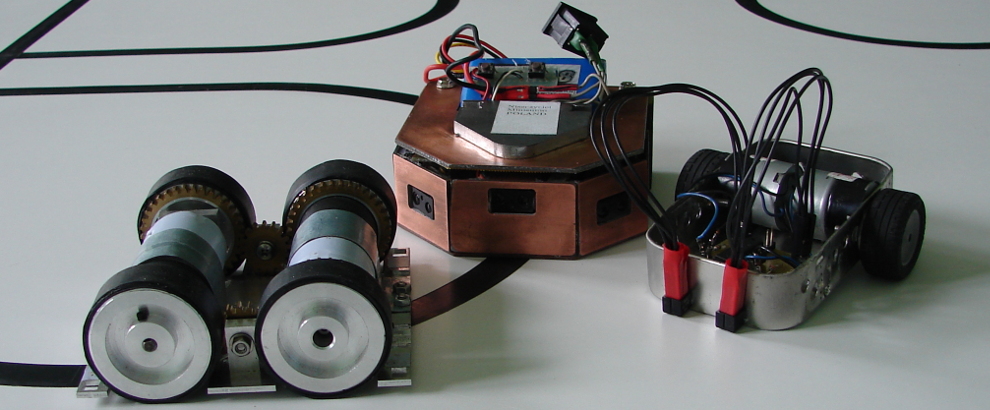
- Robot klasy SUMO

- Zdalny start/stop
- Masa 2975g
- Rozmiar 190×200 mm
- Zasilanie elektroniki: Turnigy Nanotech 3S 1000 mAh
- Zasilanie napędu: Turnigy Nanotech 4S 3300 mAh
- 2 czujniki GP2Y0D02YK
- 2 czujniki GP2Y0A02YK
- 2 czujniki GP02Y0D340K
- 4 czujniki QRD 1114
- Procesor: AtMega 90USB1287
- 2 silniki z przekładniami wymontowane z wkrętarki BOSCH
- 2 mostki VNH3SP30
Pierwotna nazwa robota to Piernik robot ten powstał w 2008 roku i wielokrotnie zajmował miejsce na podium uczestnicząc w wielu zawodach o randze zawodów międzynarodowych. Ostatnie parę lat robot spędził jednak w wydziałowej gablocie jako efekt pracy studentów. Zawody Sumo Challenge 2013 które odbyły się w Łodzi były pierwszymi zawodami dla nowej konstrukcji. Na tych właśnie zawodach Skipper zajął 2 miejsce w konkurencji SUMO.
Projektując robota klasy SUMO należy zwrócić szczególną uwagę na kilka aspektów budowy:
- wytrzymałość mechaniczną
- przyczepność
- moment
- prędkość
- zasilanie
- odprowadzanie ciepła
Klasa SUMO to roboty o dopuszczalnej masie 3 kg. Rozpędzone roboty w chwili zderzenia przekazują miedzy sobą energie która z łatwością doprowadza do uszkodzenia delikatnych elektronicznych podzespołów.
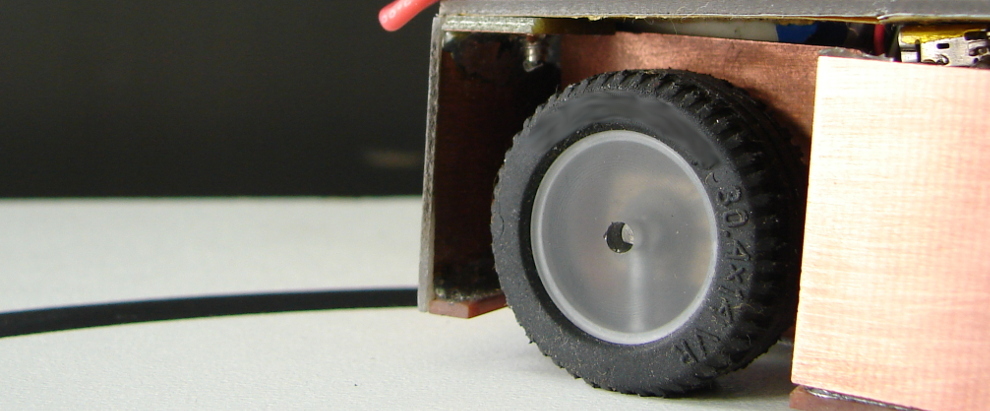
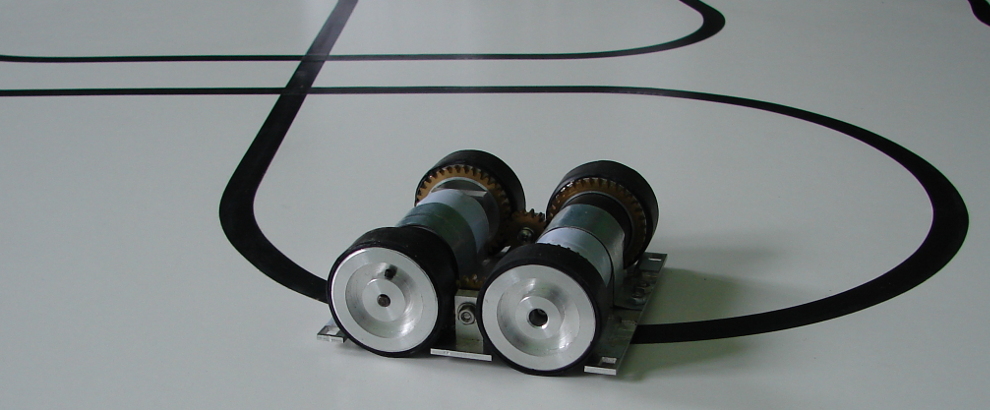
Jeżeli mamy już wytrzymałą obudowę musimy ją wprawić w ruch tu z pomocą przychodzą nam mocne silniki wraz z przekładniami cały komplet został wymontowany z wkrętarki akumulatorowej.
Stosując w Skipperze gąsienice mamy zapewnioną optymalną przyczepność . Napęd zastosowany w robocie umożliwia nam w pełni wykorzystać tarcie gąsienic o ring dzięki dużemu momentowi i prędkości zapewniamy robotowi odpowiednia dynamikę.
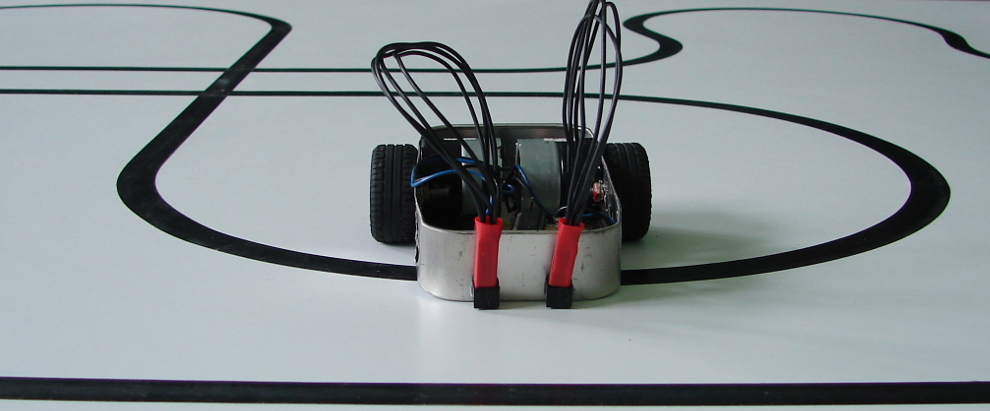
Zgodnie z regulaminem robot musi być zasilany z wewnętrznego źródła energii w przypadku Skippera są to 2 osobne pakiety, które zasilają osobne podzespoły. Mniejszy akumulator zasila część logiczną robota. Wysoko prądowy pakiet (prąd chwilowy to około 165A) zasila natomiast mostki odpowiedzialne za pracą silników pojemność pakietu wystarcza na stoczenie 8 pełnych rund co jest bardzo zadowalającym wynikiem biorąc pod uwagę prąd jaki jest pobierany przez silniki.
Będąc przy temacie silników na pewno ważną kwestią jest odprowadzanie ciepła które generowane jest przez silniki jak i mostki tutaj rozwiązanie realizuje poprzez wykorzystanie radiatorów oraz odpowiednio ukształtowaną obudowę która umożliwia swobodny przepływ powietrza, dodatkowy elementem chłodzącym silniki jest aluminiowa płyta podłogowa do której silniki te są przymocowane.
Autor: Mateusz Kuzimski
Najnowsze komentarze